 Fraunhofer-Institut für Windenergiesysteme
Fraunhofer-Institut für Windenergiesysteme
Schnell, zuverlässig und kostengünstig liefert die Lidar Boje die erforderlichen Messdaten für die Planung eines Offshore-Windparks.
Onshore wie offshore sind Windenergieanlagen (WEA) komplexen Bedingungen ausgesetzt. Entsprechend unterschiedlich sind die Herausforderungen an die numerische Simulation und Bewertung potenzieller Standorte, entsprechend unverzichtbar sind exakte Modellierungen von Windfeldern. Das IWES ist bei der Optimierung numerischer Methoden und Datensätze auf allen relevanten Skalen aktiv, um den Anforderungen der Industrie gerecht zu werden. So beeinflussen die Windparameter etwa bei der Errichtung von Offshore-Windparks Design und Auslegung der WEA sowie ihrer Komponenten inklusive der Fundamente und Türme. Um die numerischen Modelle passgenau für die Standorte zu machen, führt das IWES Offshore-Lidar Messungen durch. Dafür hat es Lidar-Messbojen entwickelt, die auf hoher See meteorologische und ozeanografische Messdaten aufnehmen. Mit innovativen Messkonzepten – unter Verwendung verschiedener Remote-Sensing-Technologien – erfasst das IWES die Windverhältnisse.
Der globale Ausbau der Windenergie findet unter unterschiedlichen Umweltbedingungen statt. Während an Land, onshore, Windparks vermehrt in sehr komplexem Gelände geplant und gebaut werden, werden auf See, offshore, große „Kraftwerke“ mit mehreren hunderten von WEA errichtet, die mit der marinen atmosphärischen Grenzschicht interagieren. Die Herausforderungen in der numerischen Simulation und Bewertung der Standorte sind entsprechend unterschiedlich.
Die Modellierung von Windfeldern wird vor allem zur Ergänzung von Windmess- und Ertragsdaten in Raum und Zeit oder aber zur Simulation zukünftiger Planungszustände benötigt. Das Fraunhofer IWES ist seit mehr als zehn Jahren in der Weiterentwicklung, Verbesserung und Anwendung von numerischen Methoden und Datensätzen auf allen relevanten Skalen aktiv. Dabei werden vor allem Open-Source-Modelle und Methoden verwendet.
Die numerische Simulation von Windenergiestandorten erfordert die Anwendung unterschiedlicher Methoden, um den Anforderungen der Industrie an Genauigkeit und Geschwindigkeit, aber auch den unterschiedlichen assoziierten Skalen gerecht zu werden. Zu diesem Zweck wurden am Fraunhofer IWES in den vergangenen Jahren verschiedene Werkzeuge zur numerischen Standortbewertung zur Berechnung von Windfeldern und Windparkerträgen bei komplexen Geländegeometrien sowie zur Berechnung von Windenergieanlagen und Windparknachläufen entwickelt.
Die Modellierung komplexer Standorte mit Computational Fluid Dynamics (CFD)-Methoden erfordert zunächst die Generierung geeigneter Rechengitter, da die Güte der Ergebnisse maßgeblich davon abhängt. Zu diesem Zweck wird seit 2012 am IWES der Gittergenerierer „terrainMesher“ entwickelt, welcher automatisiert auch große Standorte im sehr komplexen Gelände mit Gittern hoher Güte versehen kann. Basierend auf dem OpenSource-Tool „OpenFOAM“ wurden eigene Parametrisierungen und Strömungslöser zur Simulation von Windenergieanlagen, Waldeffekten und der atmosphärischen Stabilität entwickelt und in einer Vielzahl von Projekten validiert sowie Methoden zur Berechnung von Unsicherheiten implementiert.
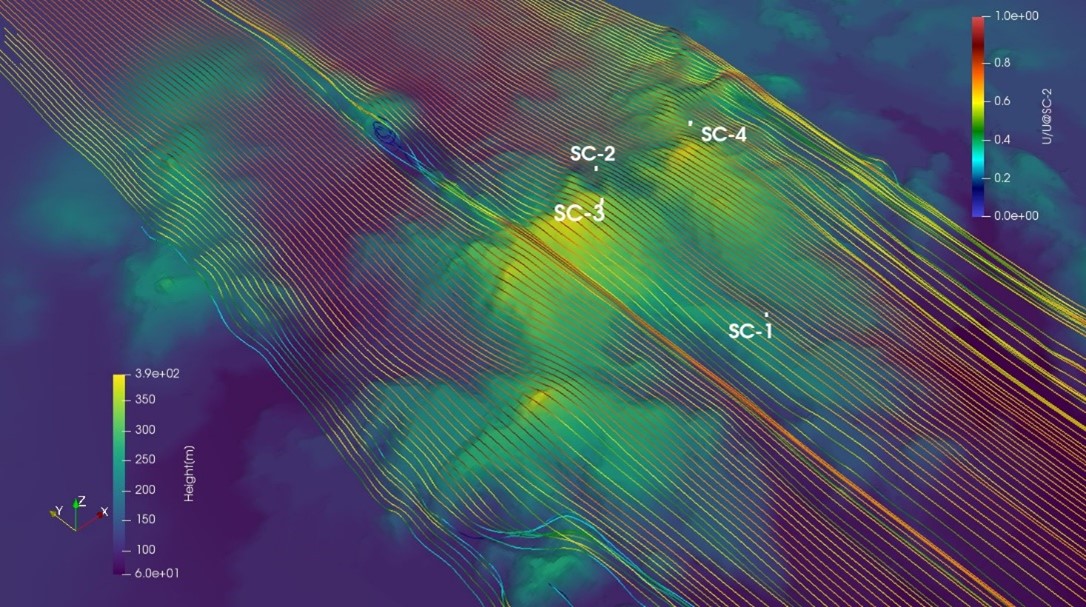
Gemeinsam bilden terrainMesher, OpenFOAM und die eigenen Entwicklungen des Fraunhofer IWES in OpenFOAM das Tool „FIWind“: FIWind ist ein vollautomatische Softwarelösung, die auf HPC-Computern oder auch in der Cloud betrieben und über ein Web-Frontend gesteuert werden kann. FIWind ist ein industriegeeignetes Modellierungswerkzeug, um Windfelder, Windzeitreihen und Erträge von Anlagen im komplexen Gelände effizient und genau zu berechnen.
Mit dem fortschreitenden Ausbau der Windenergie in großen Windparks und Windparkclustern (in Europa vor allem offshore) spielen die Auswirkungen der Nachlaufeffekte der Windenergieanlagen untereinander eine immer größere Rolle. Verschiedene Studien – auch unter Beteiligung des Fraunhofer IWES – haben gezeigt, dass sich Nachlaufeffekte offshore über 100 km und mehr erstrecken können. Die Nachlaufeffekte auf diesen Skalen können über mesoskalige Simulationen abgebildet werden, in denen die Windparkeffekte parametrisiert werden. Die Entwicklung und Validierung dieser Parametrisierungen wird vom Fraunhofer IWES mit Partnern seit einigen Jahren vorangetrieben.
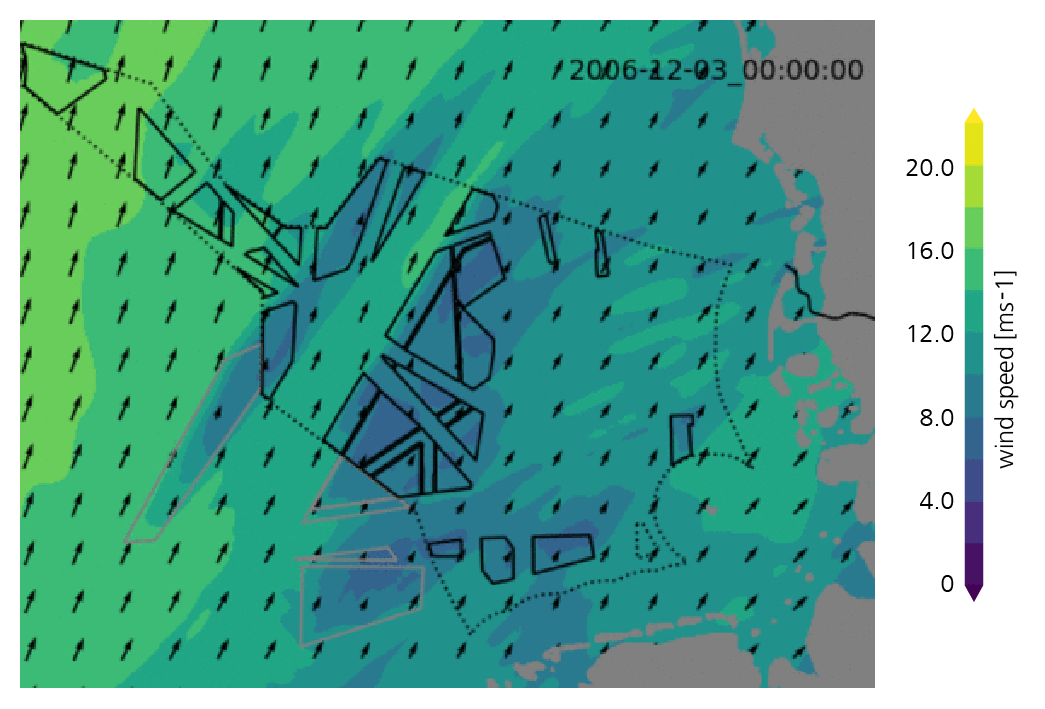
Mit diesem Modellierungsansatz hat das IWES Ausbauszenarien und großskalige Nachlaufeffekte für verschiedene Auftraggeber gerechnet.
Für die detaillierte Planung von Windparkflächen und deren Optimierung wird seit 2012 das OpenSource Industriemodell FOXES (Farm Optimization and eXtended yield Evaluation Software) entwickelt, mit welchem bereits in verschiedenen Offshore-Regionen Windparks geplant wurden. Gekoppelt mit der Mesoskalenmodellierung können Küsteneffekte oder langreichweitige Nachlaufeffekte, die sich über verschiedene Skalen erstrecken, abgebildet werden.

Offshore-Windparks werden zunehmend an Standorten meist fernab der Küste errichtet, an denen die Windverhältnisse nicht in ausreichender Genauigkeit bekannt sind. Selbst an in der Vergangenheit vermessenen Standorten führen nachträglich gebaute Windparks mit ihren Nachlaufeffekten zu einer Veränderung der vorherrschenden Windressource. Die verschiedenen Windparameter sind nicht nur zur Bestimmung des Windpotentials notwendig und somit für die Wirtschaftlichkeitsberechnung eines Windparks, sondern auch für das Design bzw. die Auslegung der Windenergieanlage und ihrer Komponenten inklusive der Fundamente und Türme. Genaue Messdaten, geringe Messunsicherheiten und zudem eine hohe Verfügbarkeit sind meist unverzichtbar. Das Fraunhofer IWES hat hierfür eine eigene Messboje entwickelt, welche auf hoher See für die Windindustrie relevante meteorologische und ozeanografische Messdaten aufnimmt. Ebenso erstellt das IWES innovative Messkonzepte unter der Verwendung einer Vielzahl verschiedener Remote-Sensing-Technologien.
Das Fraunhofer IWES beschäftigt sich seit 2009 mit der Entwicklung von Floating-Lidar-Systemen (FLS) sowie mit Methodiken zur Korrektur der Messdatenverfälschung aufgrund der Eigenbewegung der Lidar-Boje. Der erste Prototyp der Fraunhofer IWES Wind-Lidar-Boje wurde 2013 erstmals offshore getestet und seit 2017 auch für die kommerzielle Messung zur Bestimmung des Offshore-Windpotentials eingesetzt.
Das IWES übernimmt neben der Datenanalyse auch die Planung der Messkampagne samt Installation, Betrieb und Wartung der Lidar-Boje.
Für die Messungen weit draußen auf dem Meer sind die Lidar-Bojen in robuster Art und Weise aus einem Stahlkörper gefertigt. Das Herzstück der Boje – das Lidargerät WindCube V2.1 oder ZX300 – ist sogar zusätzlich durch einen Aluminiumkasten geschützt. Die Aufbauten der Boje ermöglichen die Montage weiterer meteorologischer und ozeanografischer Messsensoren, auch Sonderanfertigungen der Bojenstruktur sind möglich.
Zur Sicherstellung der Messgenauigkeit und Reduzierung der Messunsicherheiten hat das IWES zahlreiche Vergleichsmessungen an Messmasten in der Nordsee durchgeführt. Hierbei wurden eine Vielzahl von Typen-Klassifizierungen sowie Methodiken zu Korrektur der Turbulenzintensität (TI) entwickelt.
Neben der Entwicklung und Anwendung der FLS-Technologie ist das IWES federführend in der Standardisierung der FLS-Anwendung – unter anderem OWA-Roadmaps und 61400-50-4 – und bietet seine Expertise auch unabhängig von der eigenen Lidar-Boje an.
Zuverlässige und aussagekräftige Windmessungen werden in verschiedenen Phasen des Lebenszyklus eines Windprojekts sowie in vielen Bereichen der Windenergieforschung benötigt. Das IWES benutzt vor allem Wind-Lidar-Technologie – ob als Vertikal-Profiler auf Bojen (wie oben beschrieben) und Schiffen, vorausschauend auf Gondeln von Windenergieanlagen oder Scanning-Lidar mit flexiblen Scan-Geometrien und großen Reichweiten – um umfangreiche Messdaten zu generieren. Diese werden zur Planung von Windparks verwendet, im Betrieb und zur Validierung von Windparkmodellen oder Kalibrierung von Mesokalensimulationen. Innovative Messkonzepte setzt das IWES beispielsweise in den Projekten FLOW und NEMO um. Als mögliche nächste Generation des optischen Wind-Remote-Sensings erprobt und evaluiert das IWES Dual-Doppler-Radartechnologie im Projekt Windpark RADAR. Ergänzend hierzu hat das IWES in den vergangenen Jahren eine führende Rolle in der normativen und prä-normativen Standardisierung von Windmessungen mittels Remote-Sensing eingenommen. Das IWES agiert unter anderem als Operating Agent von IEA Wind Task 52 zu Wind Lidar.


Messkampagne mit einer LiDAR-Boje zur Windpotentialermittlung